|
|
Post by glactus on Dec 1, 2011 3:35:45 GMT
The Mobile Servicing System (MSS), better known by its primary component Canadarm2, is a robotic system and associated equipment on the International Space Station. Launched to the ISS in 2001, it plays a key role in station assembly and maintenance; it moves equipment and supplies around the station, supports astronauts working in space, and services instruments and other payloads attached to the ISS. Astronauts receive specialized training to enable them to perform these functions with the MSS' various systems. 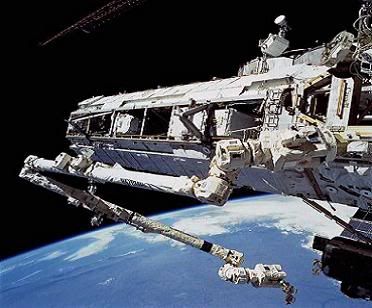 The Canadarm 2 control The MSS is composed of the actual arm called Space Station Remote Manipulator System (SSRMS), the Mobile Remote Servicer Base System (MBS) and the Special Purpose Dexterous Manipulator (SPDM also known as Dextre or Canada hand). The system can move along rails on the Integrated Truss Structure on top of the US provided Mobile Transporter cart which hosts the MRS Base System. The system's control software was written in the Ada 95 programming language  The Canadarm 2 arm The MSS was designed and manufactured by MDA Space MissioNS (previously called MD Robotics; previously called SPAR Aerospace) for the Canadian Space Agency contribution to the International Space Station  Canadarm 2 arm view To see video of the Canadarm 2 in operation just click on the link below. Has sound. Full screen option bottom right. www.metacafe.com/watch/3199663/canadarm2_how_it_works/ Credits: These are non copywrite images Text by wikipedia Video by metacafe.com |
|


